 Story told by Mark Wang
Story told by Mark Wang
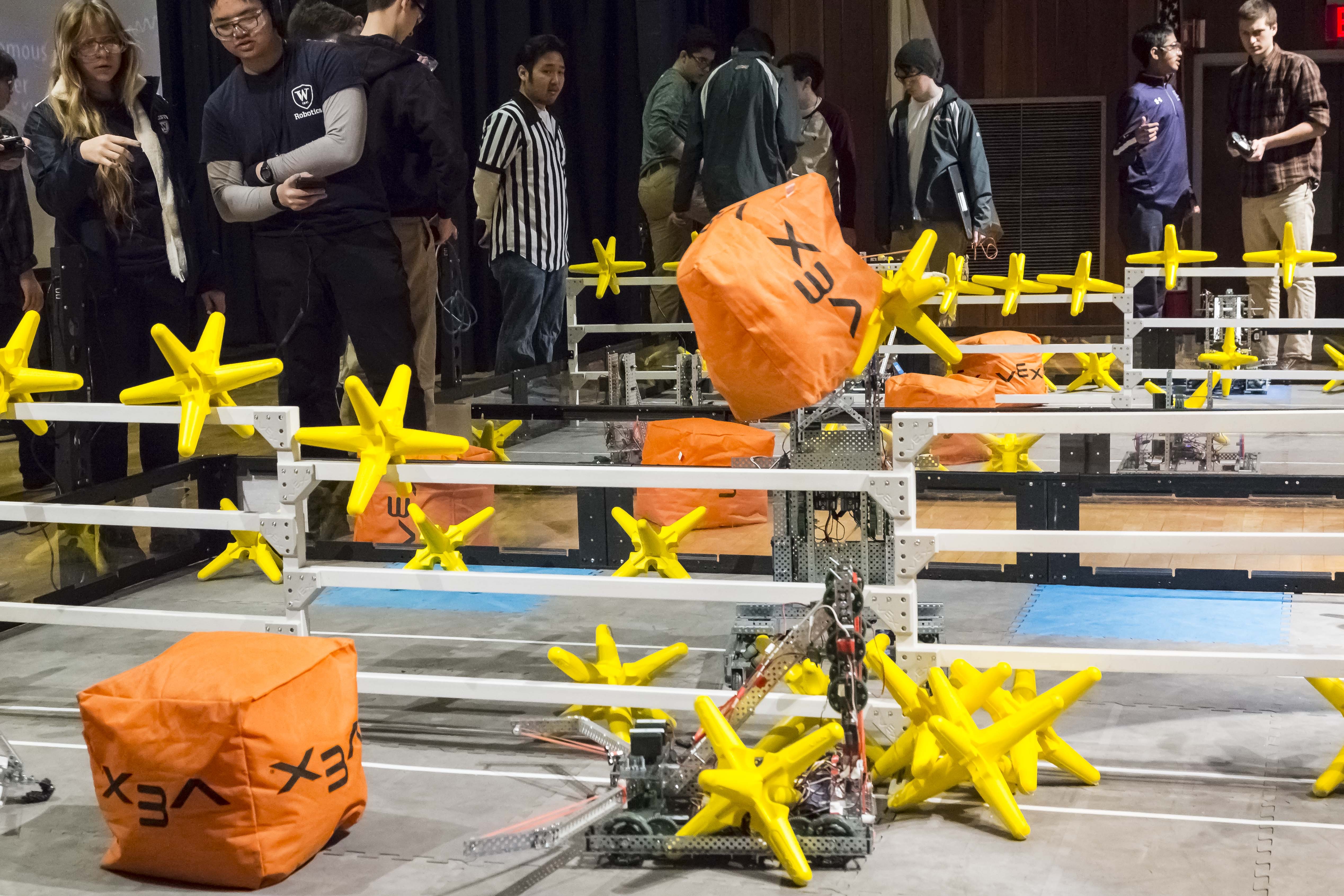
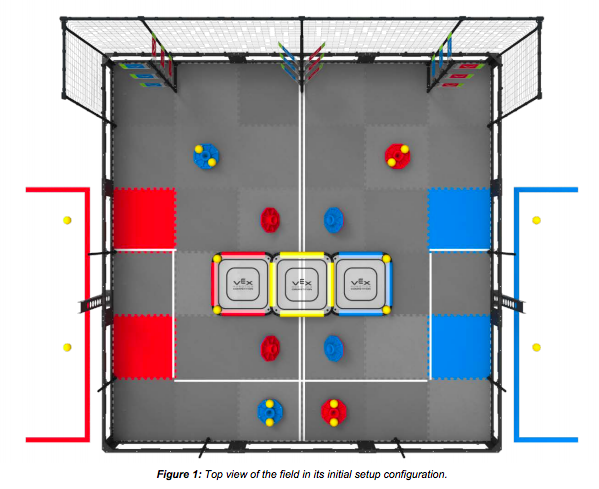
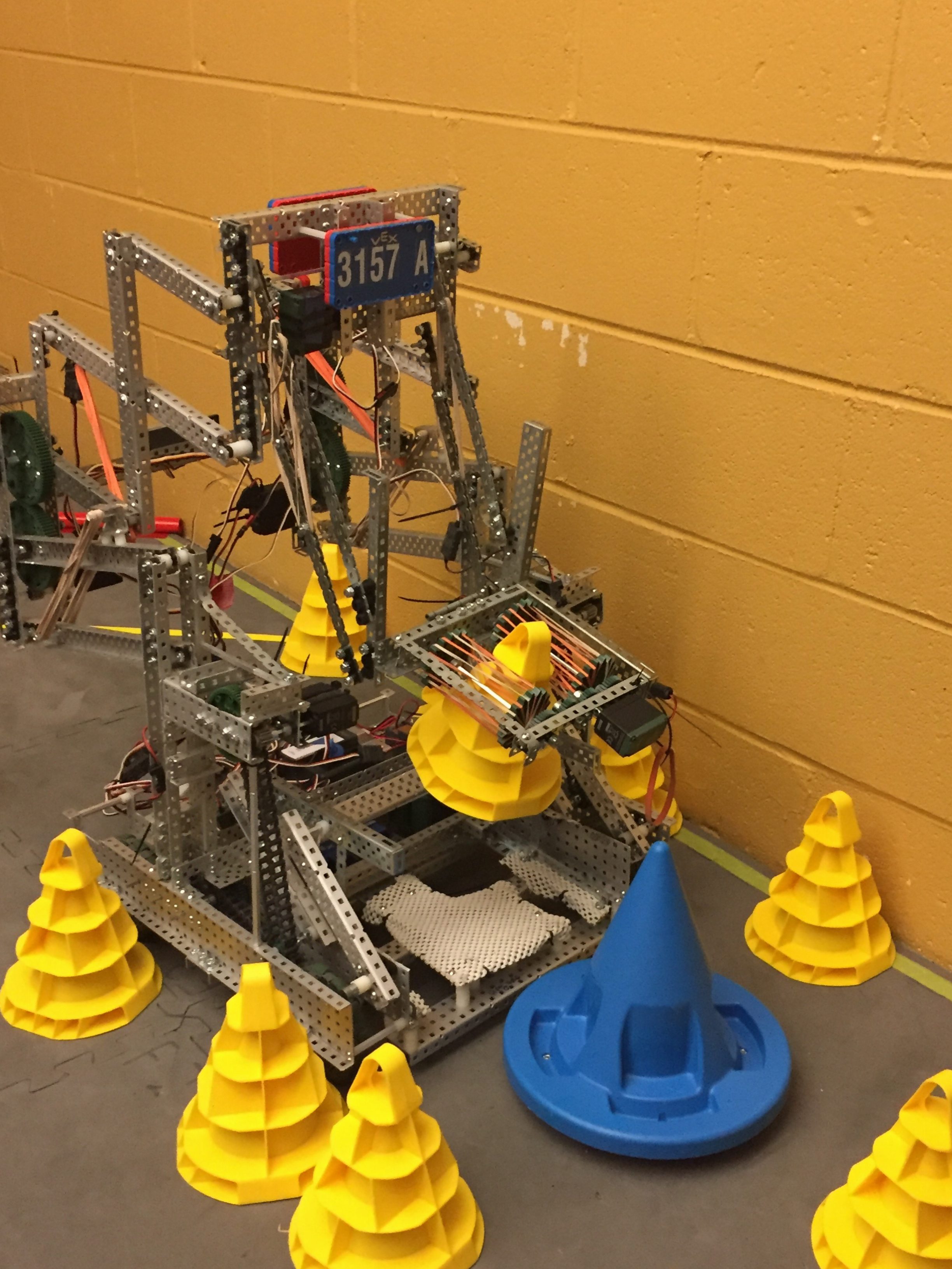
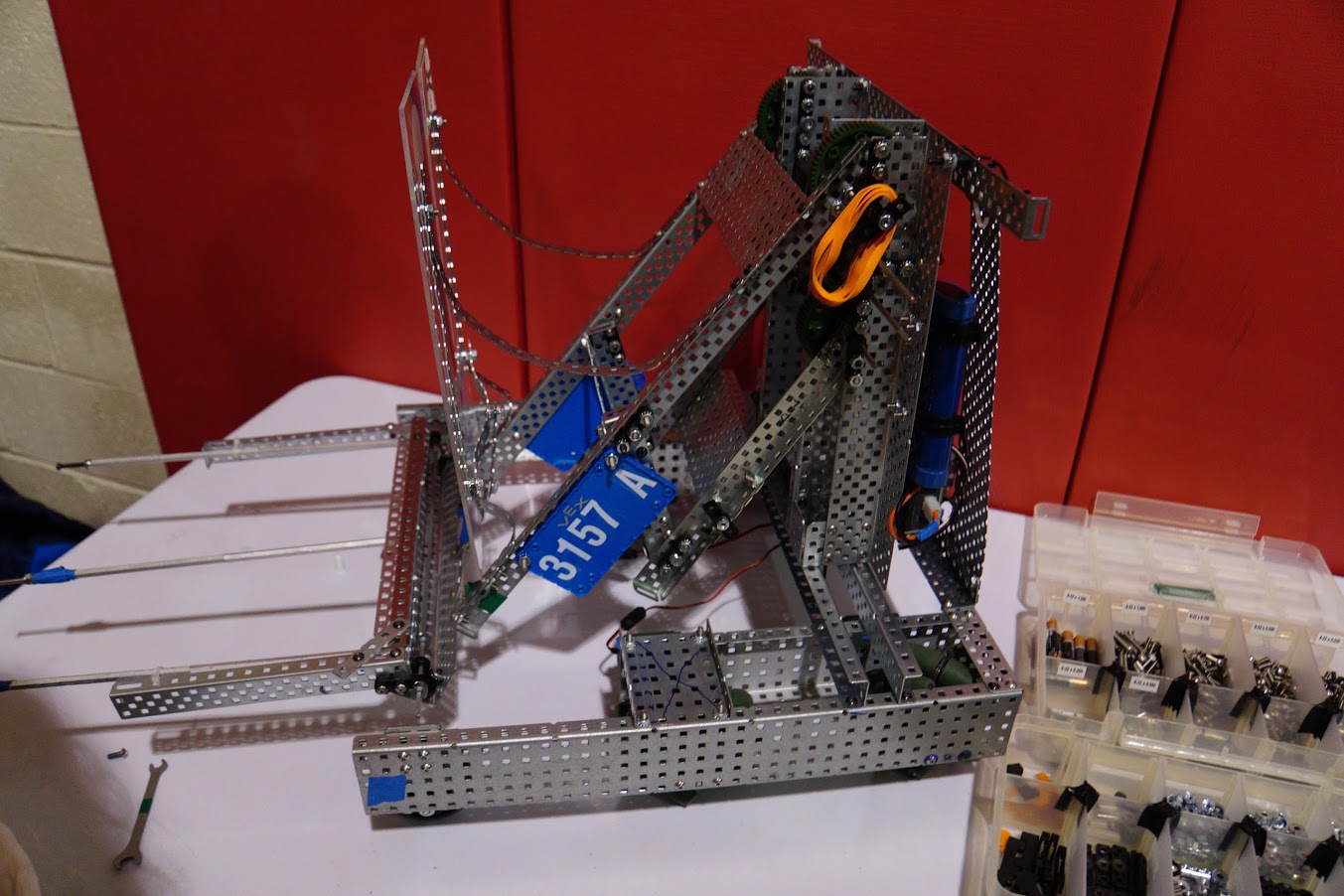
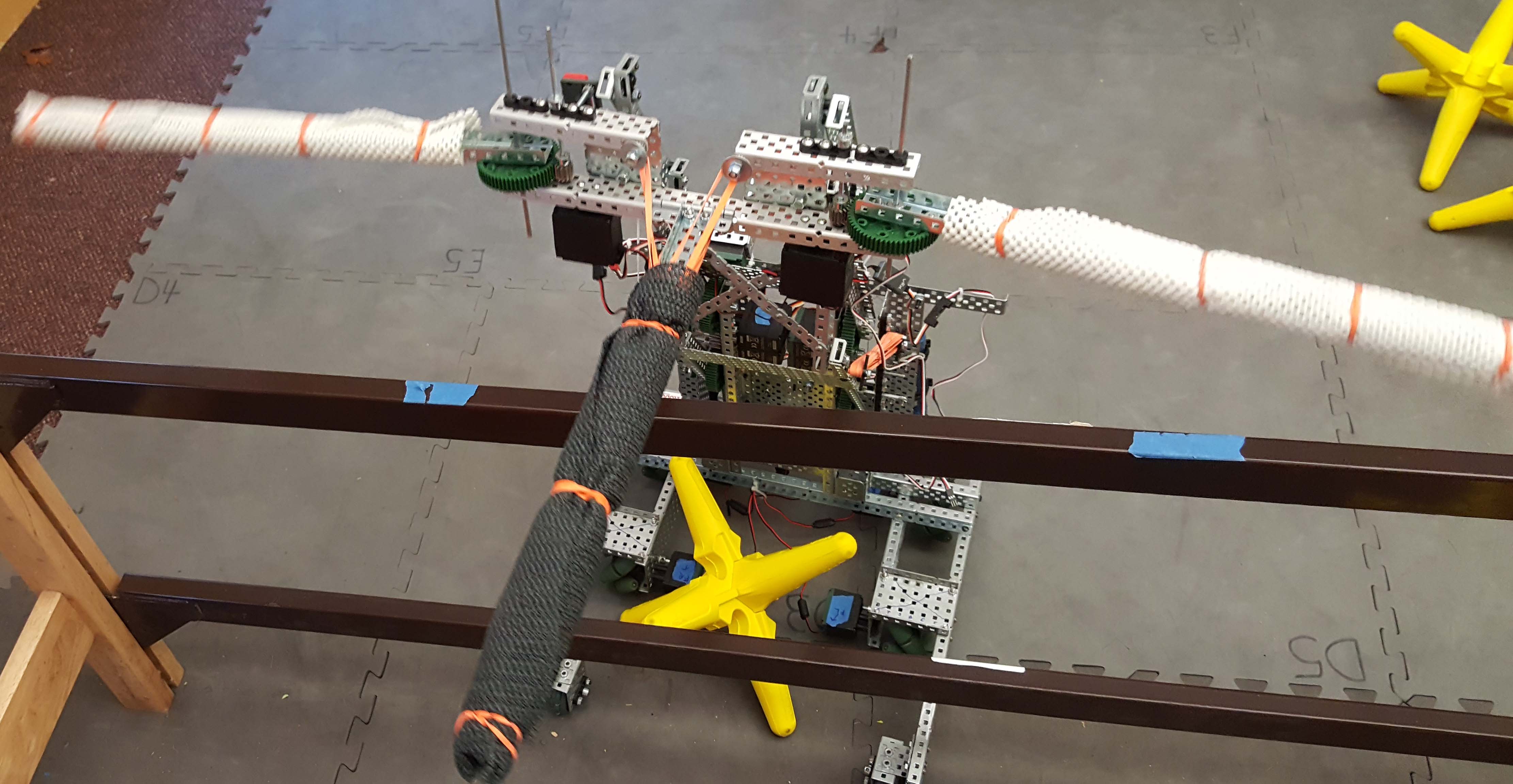
On Saturday, February 11th, we participated in a qualifying tournament at Quinsigamond Community College in Worcester, MA. We had given our robot a complete overhaul in design following the previous tournament so we were eager to see how it would perform during competition. After observing a number of matches played by many of the robots, we realized our robot was the only one with the capability of picking up two of the orange cubes at the same time. In addition, our robot can pick up five stars when they are clumped together. Though we were not so sure how our new robot would perform in competition, we believed our robot would do fairly well. We wanted to do well so we could experience what it would be like to be in the top tier after the qualifying rounds and to be able to choose our alliances for the elimination rounds.
For our first match, our alliance partner did not show up but we still won the match. Winning the first match was encouraging and gave us hope for a successful day. The running stats showed we were in first place for a period of time. We lost only one match out of seven and even that match was very close. We were among the top ten teams out of forty nine the entire day. We were in third place at the end of the qualifying rounds.
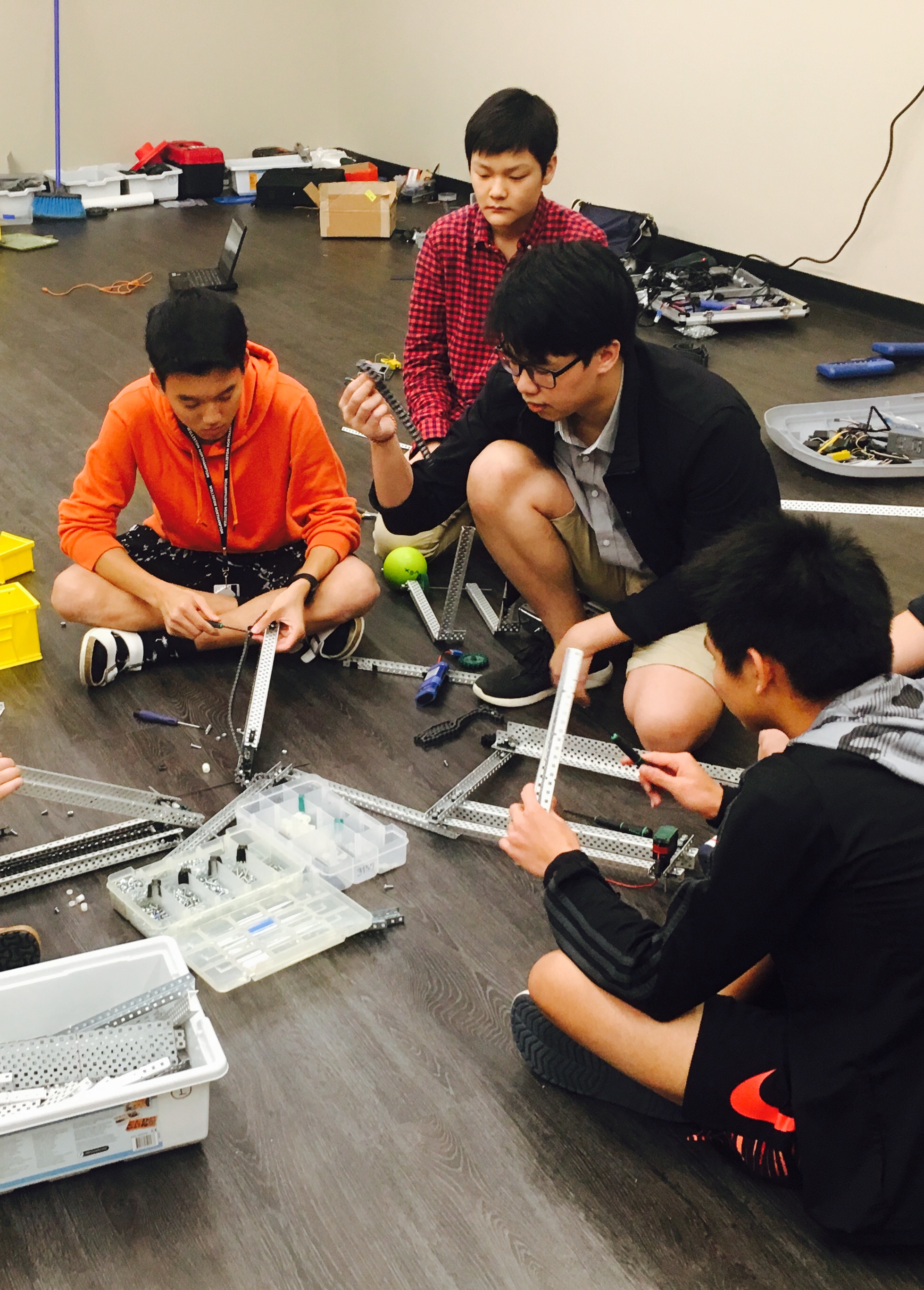
When we were not involved in a match, we spent our time interviewing the other teams to learn as much about the strengths and weaknesses of their robot. This is called “scouting” and was very helpful when it came time to choose a team to be our alliance for the elimination rounds. Not only do we learn about the other robots but we also get acquainted with members of other teams.
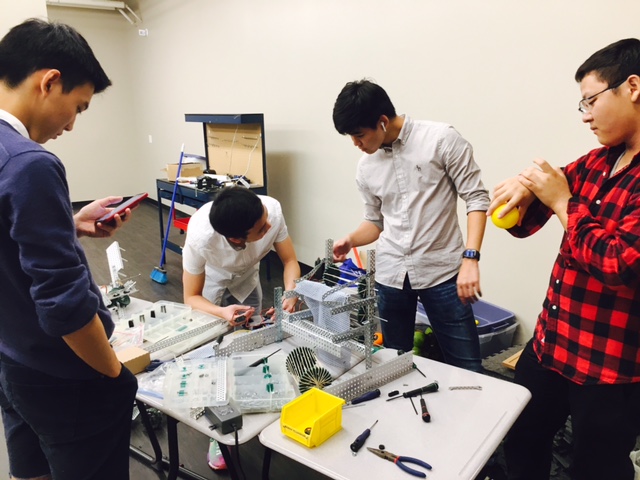
During the quarter finals, our alliance lost the first of three matches unexpectedly. We won the second match and then called a time out to adjust the programming of our autonomous program before the third match. Changing workable code without the opportunity to test it out was not a good idea. The robot jammed under the fence and was rendered useless for the remainder of the match. We learned a valuable lesson. We lost our opportunity to move on in this tournament. Now with two more weeks to revise our robot and our strategy, we have established and agreed on a clear plan to have the best robot possible ready for the Championship Tournament March 4th and 5th.




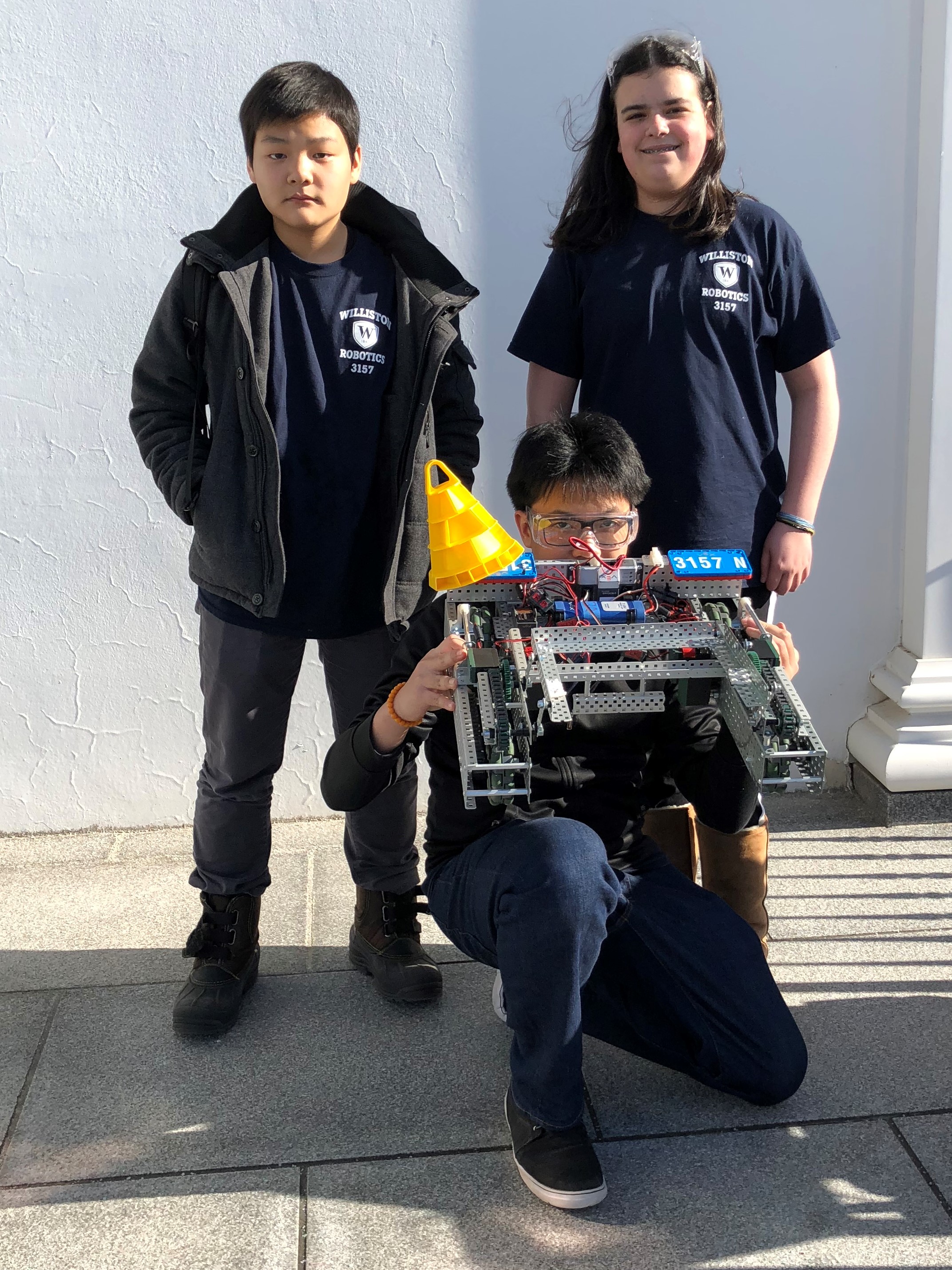
 competition at North Andover, has qualified for the Southern New England Regional Competition! The competition was attended by both Team A and the newly named Team N (N for New) and we both did an amazing job. Both made it into the elimination rounds and an exciting match took place where Team A faced off against Team N! In the end, after a close battle, Team A took the victory and continued on to the final match which got them a place in the regional competition! Stay tuned for reports on future competitions and follow Team A to Regionals!
competition at North Andover, has qualified for the Southern New England Regional Competition! The competition was attended by both Team A and the newly named Team N (N for New) and we both did an amazing job. Both made it into the elimination rounds and an exciting match took place where Team A faced off against Team N! In the end, after a close battle, Team A took the victory and continued on to the final match which got them a place in the regional competition! Stay tuned for reports on future competitions and follow Team A to Regionals!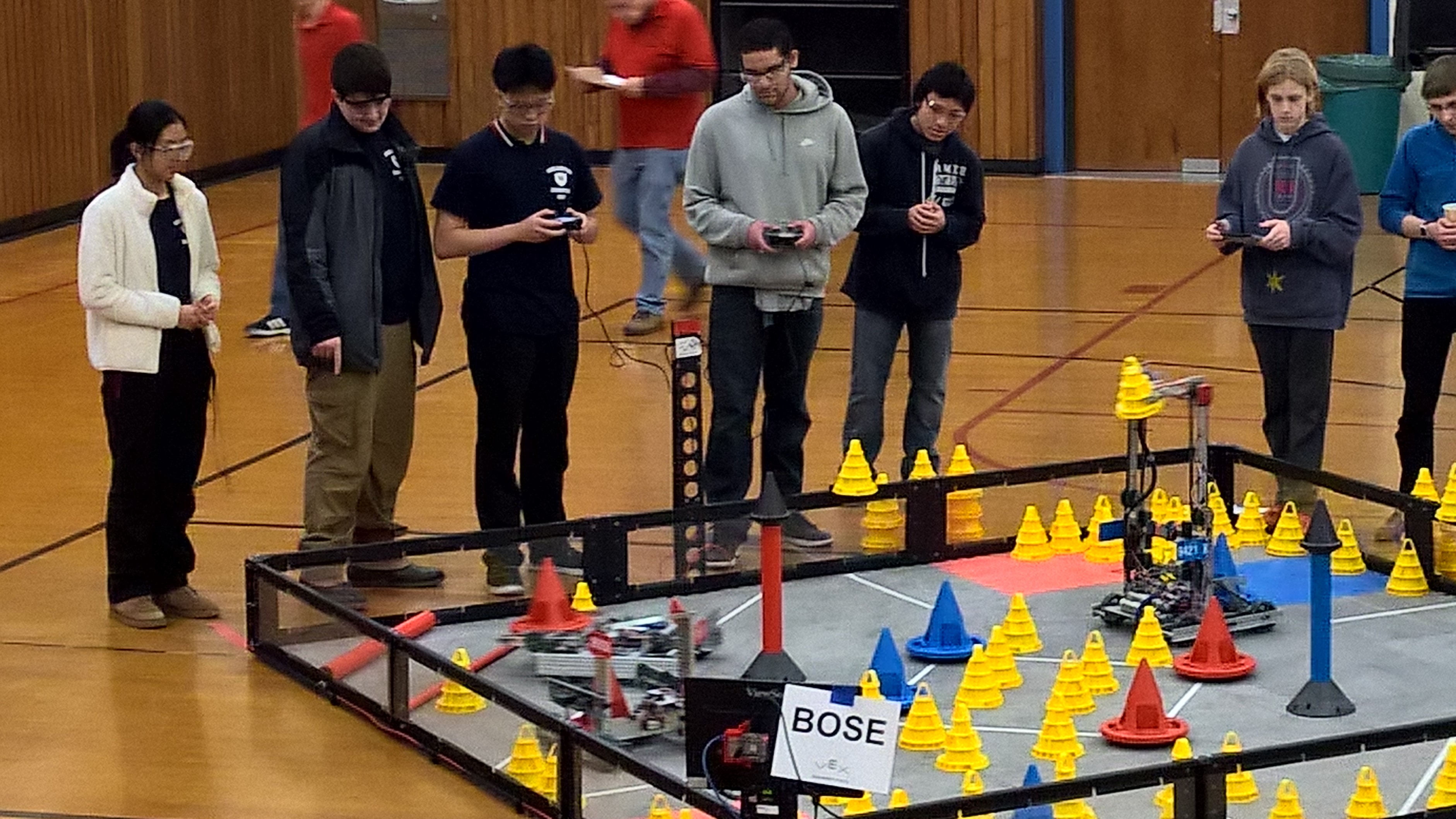


{kind=link}