

Hello Everyone! Greetings from your favorite Robotics team, Wildcats!
This year, we will compete with two teams: 3157N lead by Jack’20 and Rider’20, and 3157A lead by Mac’20. Seniors Kohmei, Andrew and Glede will serve as coaches and overseers.

Although some of the most crucial parts including motors have not come in yet, both teams worked really hard this week. We are really making good use of what we’ve got!
Here are some examples of the progresses we made this week:
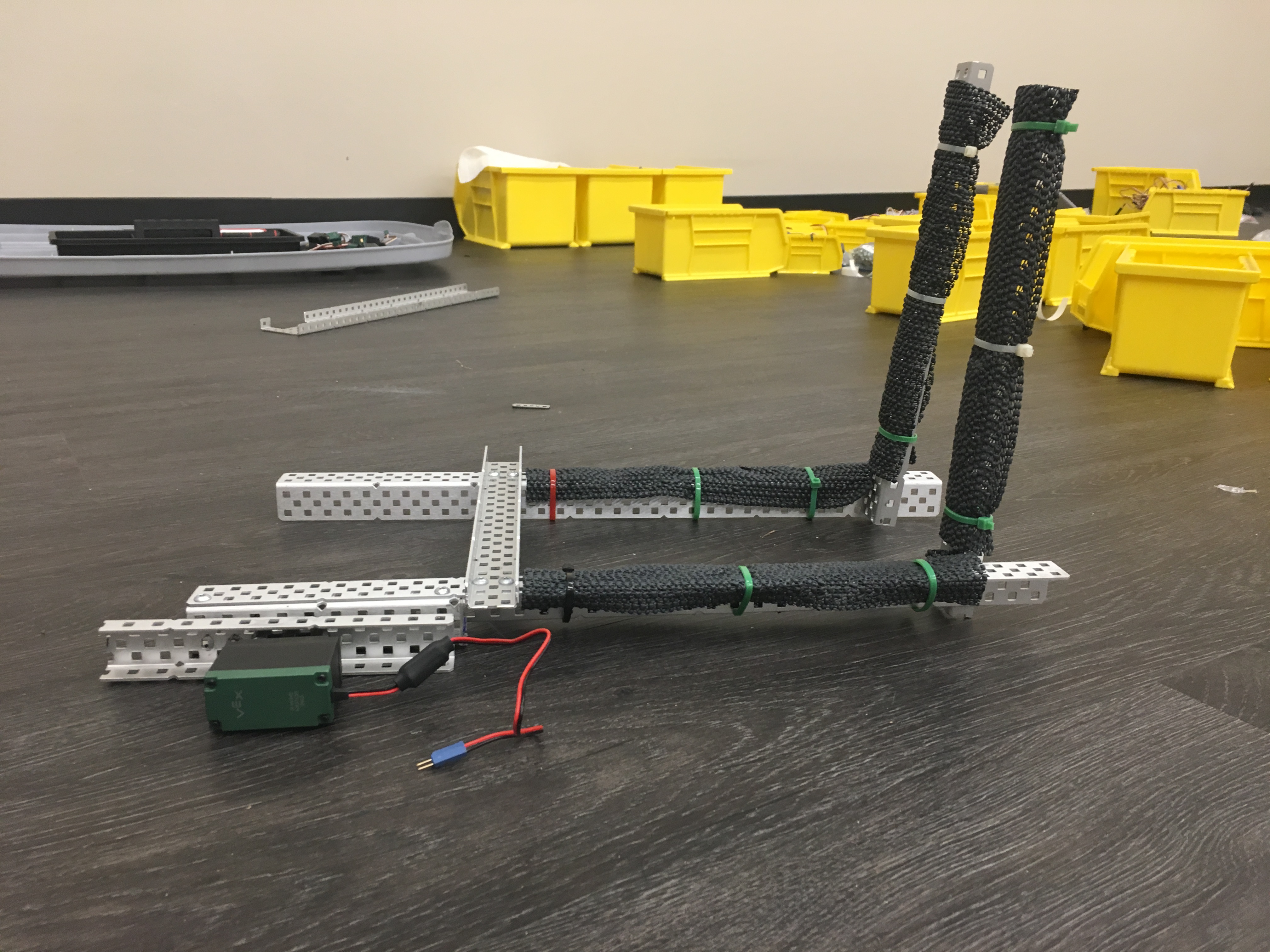
This is a L-shaped cap-grabber designed by 3157N. It is less alignment dependent, light and easy to integrate to the whole robot. However, it is not intuitive for driver to control, meaning that we will need extra practice time, and it will make the lift to become higher than it needs to be. We still need to overcome this problem.
Here is a video of 3157A Team members Peter and Tee testing their ball-launcher. It can shoot 2 balls at a time. Click the green words to watch this ten-seconds click!
We will keep doing mechanisms and prototype developing until the core parts arrive. Please keep following us and see our progresses!
Thanks,
Glede,

{kind=link}