We are back! Read about how we have improved our robot for even greater success as we go to our next competition at Quinsigamond this Saturday:
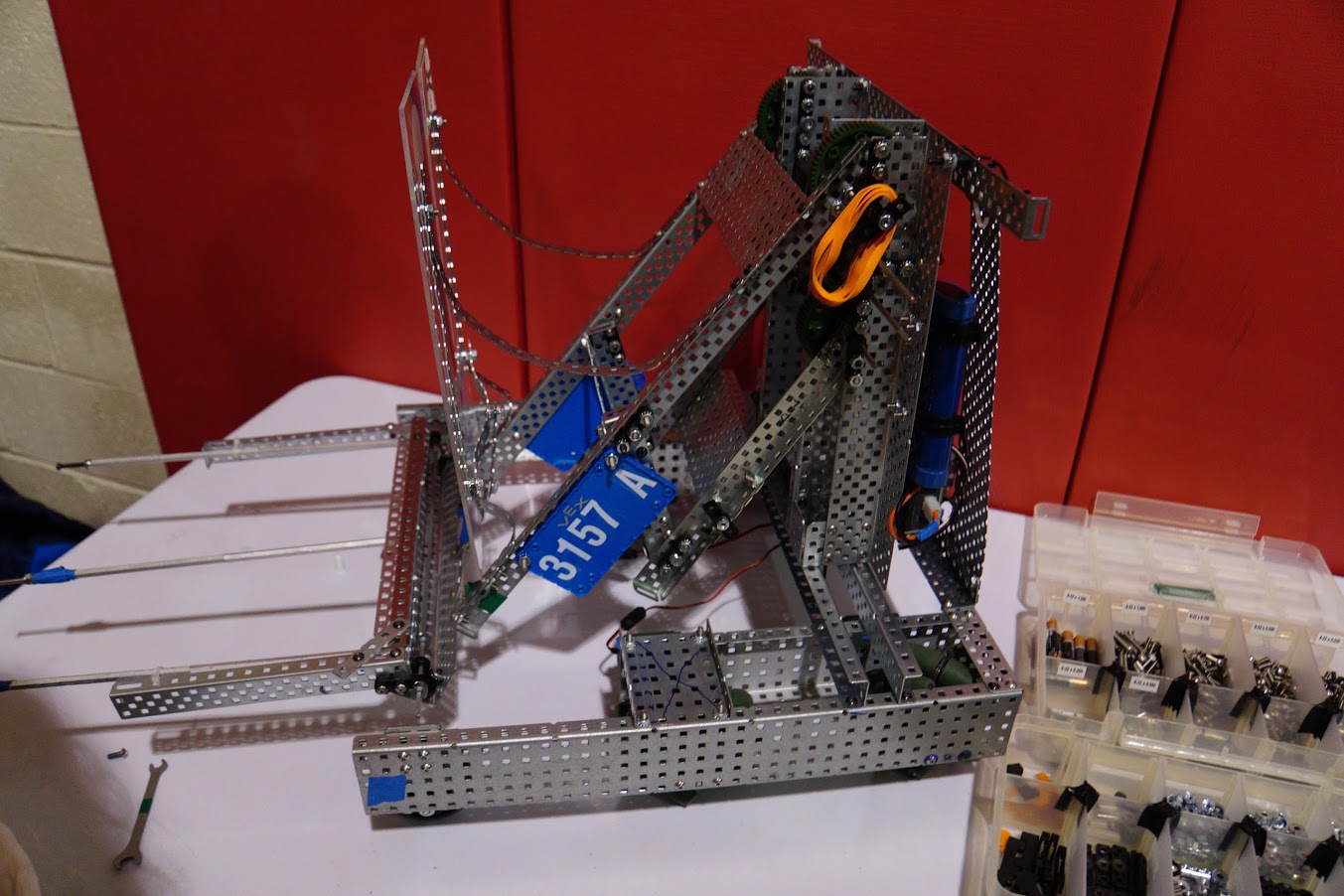
Our first design (shown above) consisted of a pitchfork and backboard, which allowed us to scoop up to two stars and dump them over the fence. While this design was great for winning at the qualifiers, it felt sluggish and it couldn’t toss cubes over the fence reliably.
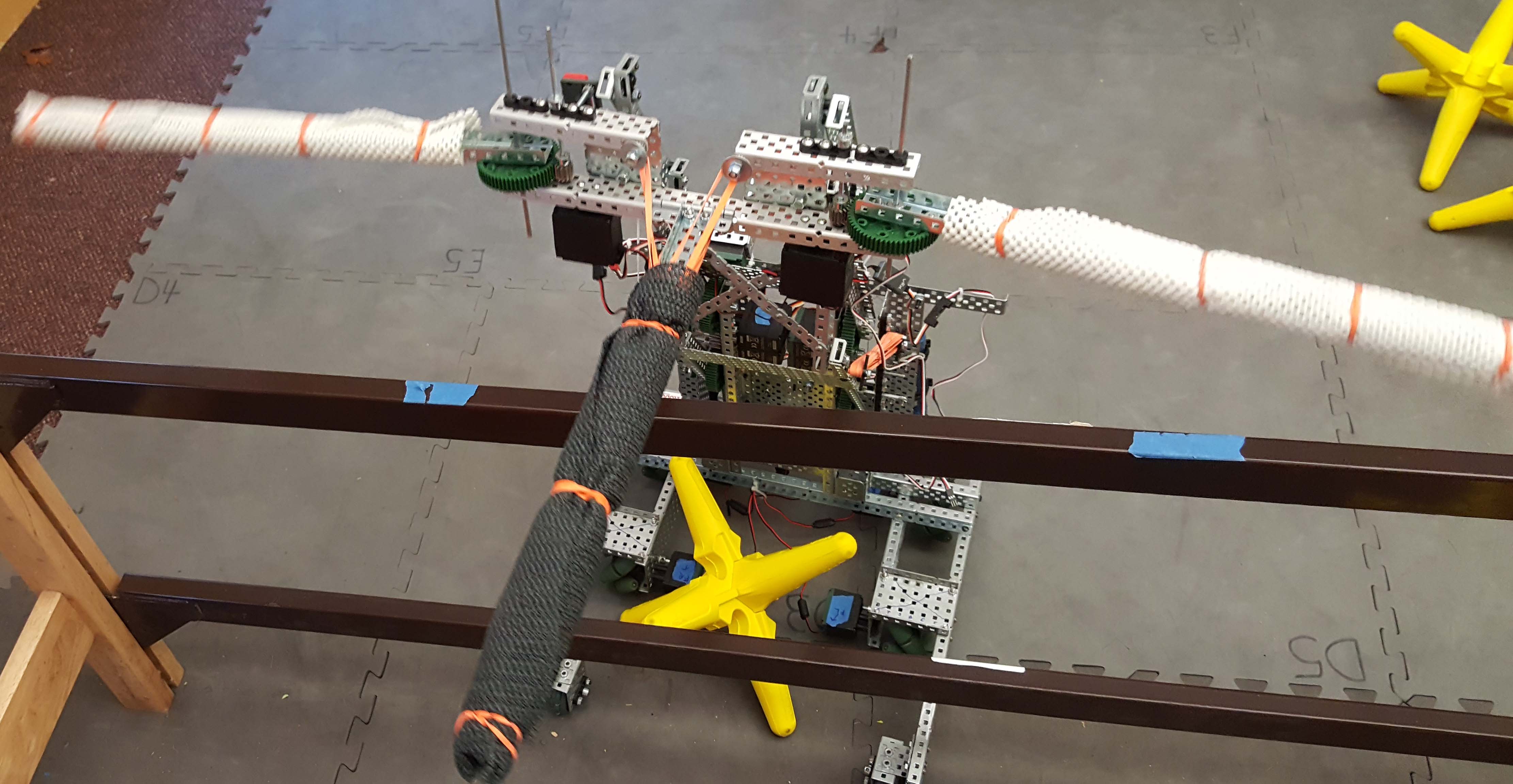
We went through a design process and came up with Yana’s Revenge, a grabber style arm that can easily grab cubes and up to six stars. Yana’s Revenge became our main design because it was much more capable at completing the tasks. It can also clap, so that’s nice.
This became our design of choice because it has a fixed bar in the middle that works with both motorized side arms. Using our controller, we can make the robot pick up as many as four stars reliably and also clap. We can also control each side arm independently, giving us improved control. Below are pictures of the new design.